
Kavraki group in Septemeber 2025

Kavraki group in June 2022

ICRA 2018
Lydia Kavraki giving a keynote at the 2018 IEEE International Conference on Robotics and Automation in Brisbane, Australia

Robonaut2
Planning motions for the legged version of Robonaut2 inside the International Space Station.
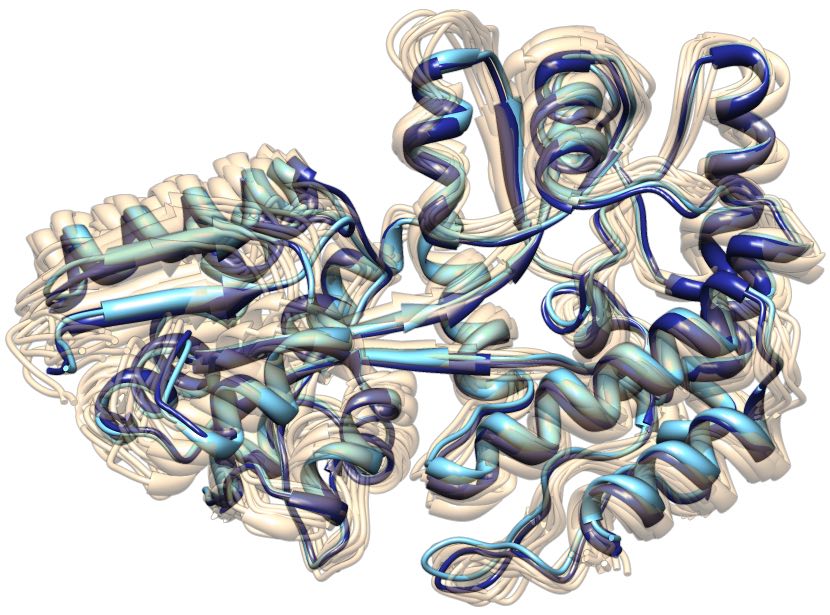
Conformational analysis
We have developed a method to explore flexibility of large macromolecules.

Kavraki group in May 2021
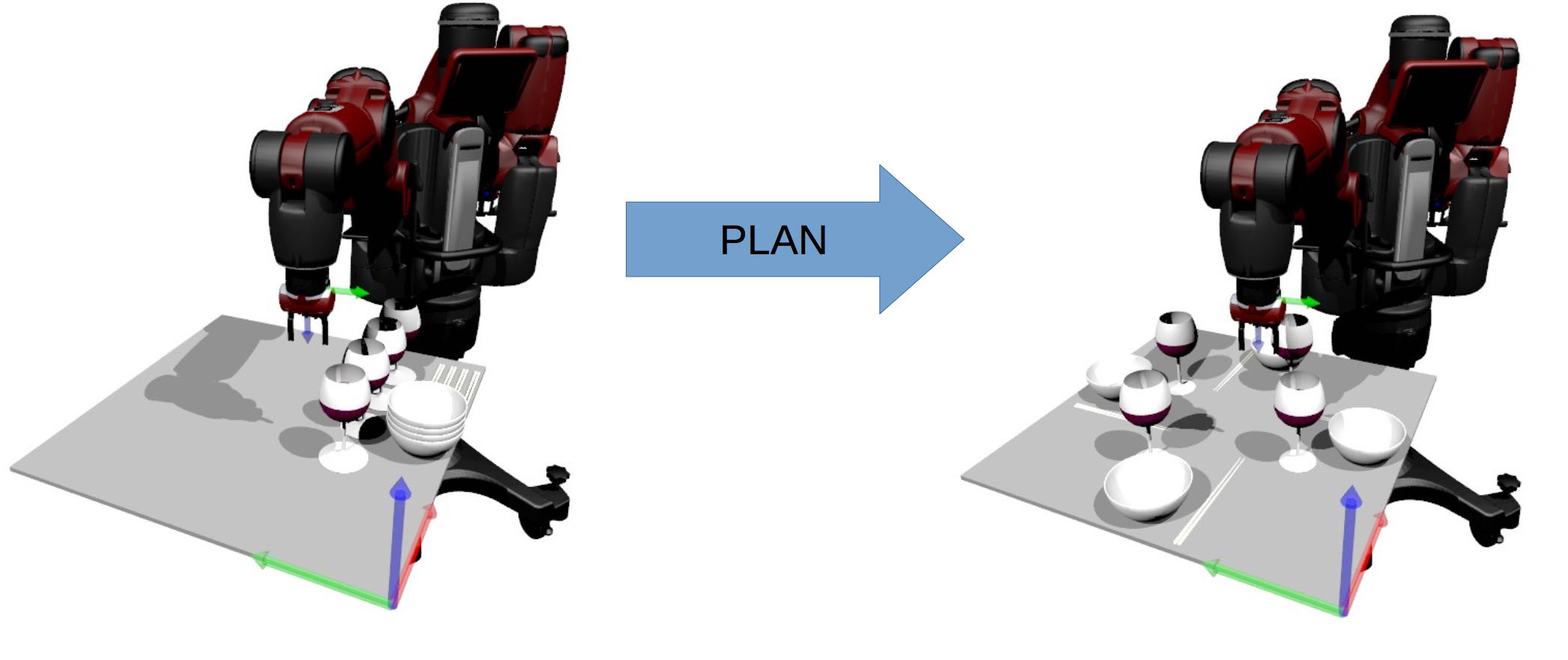
Task and motion planning
In integrated task and motion planning, a search for a sequence of discrete actions is interleaved with finding continuous motions.
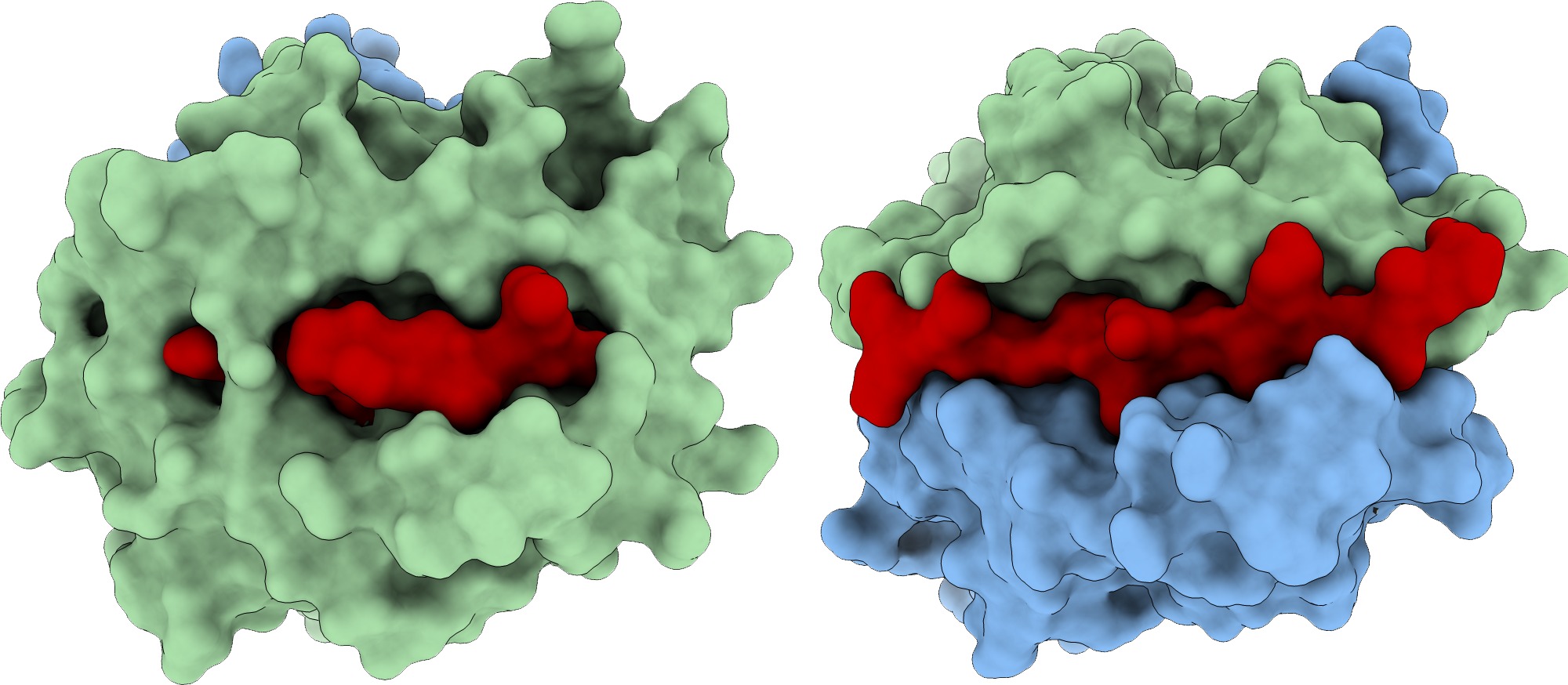
Computational immunotherapy
We are interested in predicting the binding modes of peptides to both class I (left) and class II (right) MHC receptors.
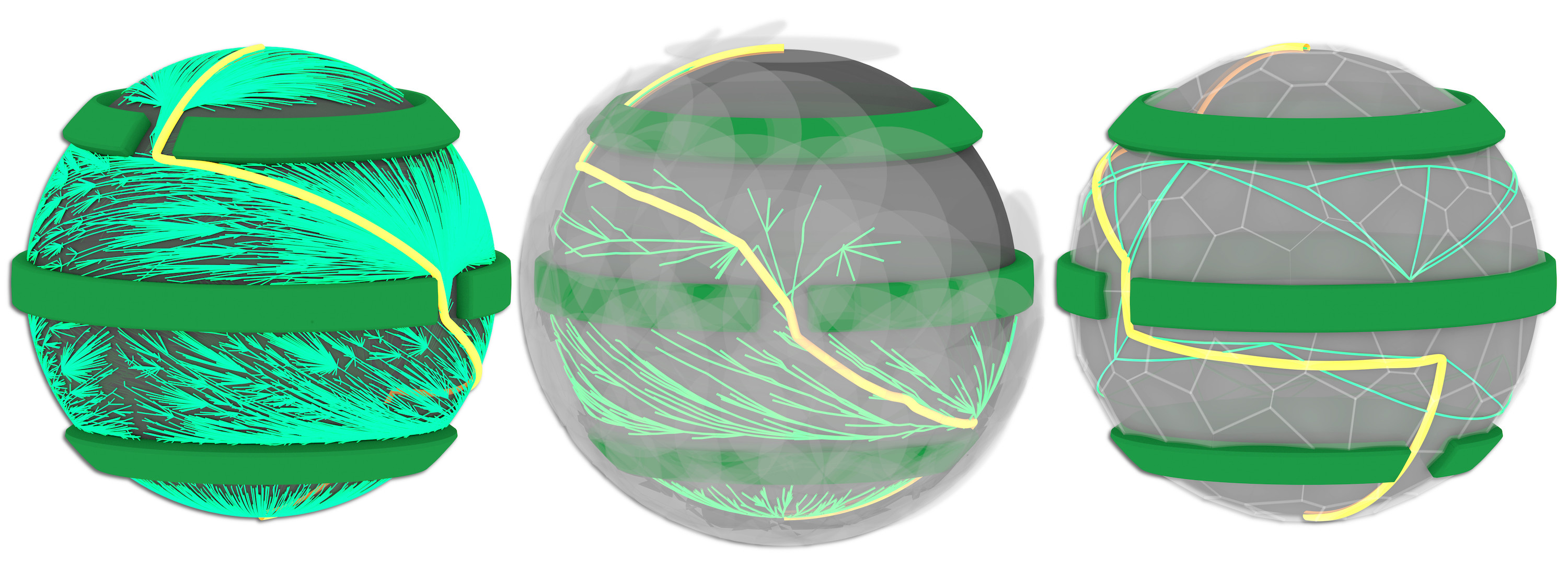
Manifold-Constrained Motion Planning
Asymptotically optimal manifold-constrained motion planning available in OMPL.
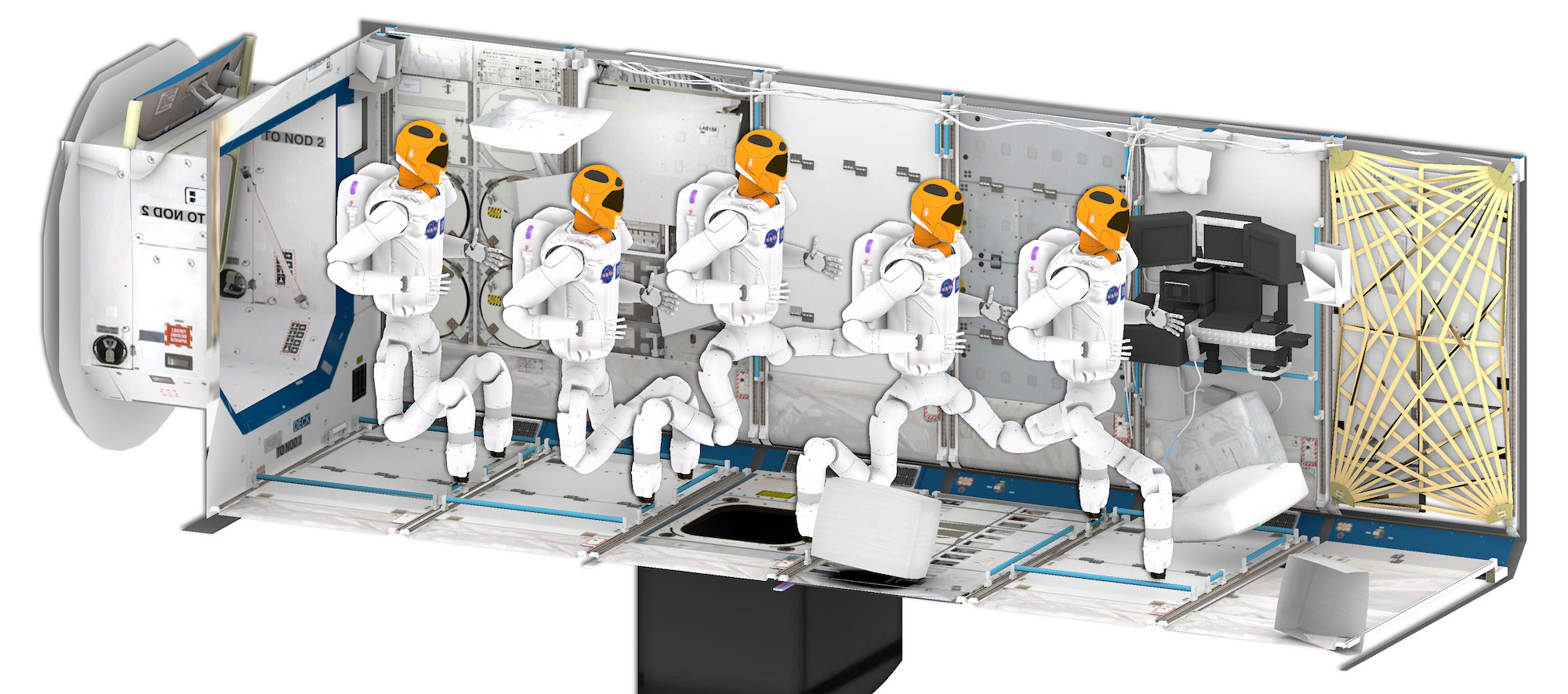
Robonaut 2
Robonaut 2 walking inside the International Space Station powered bymanifold-constrained motion planning.

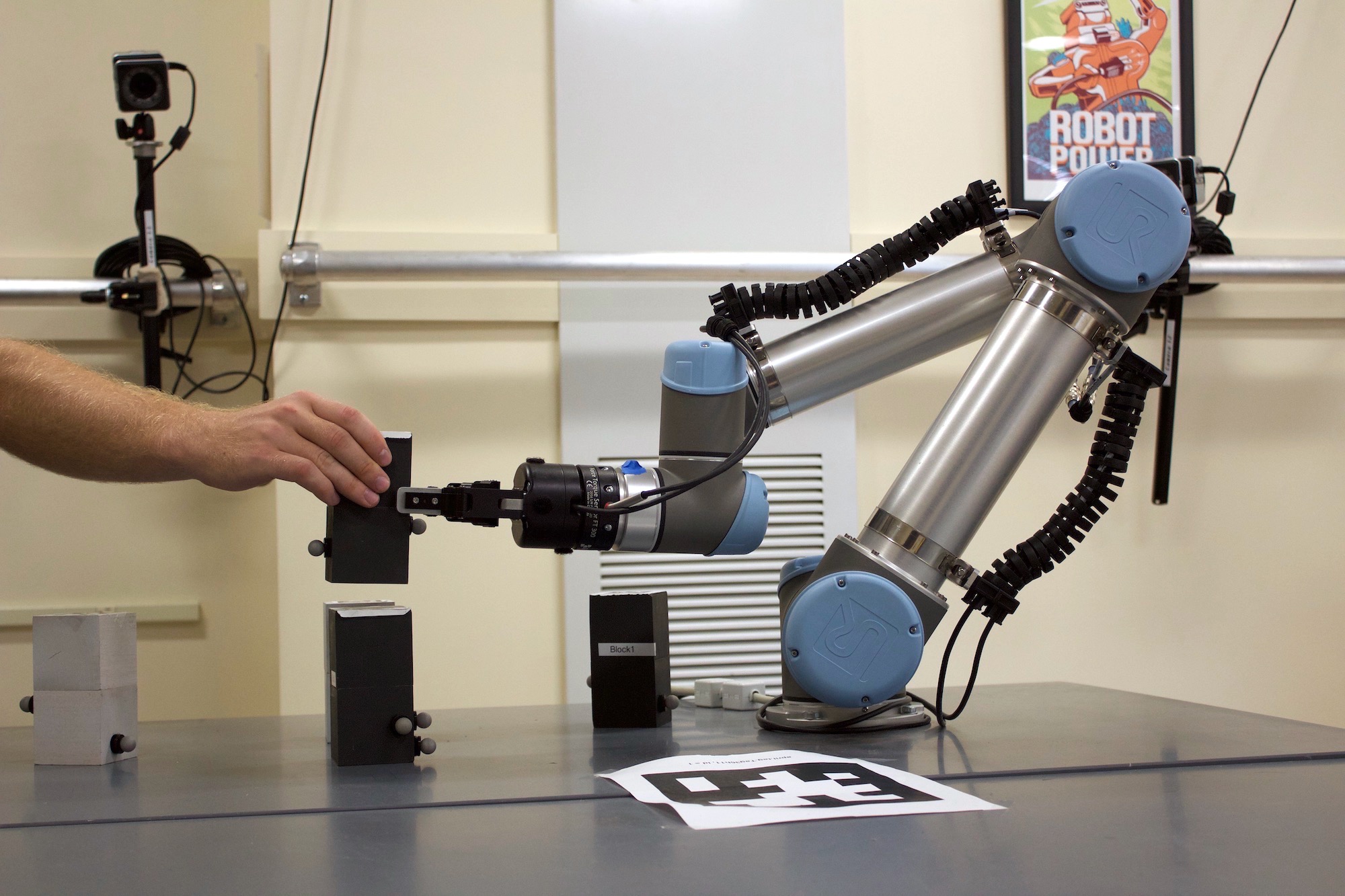
Human-robot interaction applications
Motion planning techniques that enhance human-robot interaction (HRI) capabilities.

Motion planning for underwater vehicles
Navigation through unexplored underwater environments using autonomous underwater vehicles (AUVs). Work in collaboration with University of Girona.
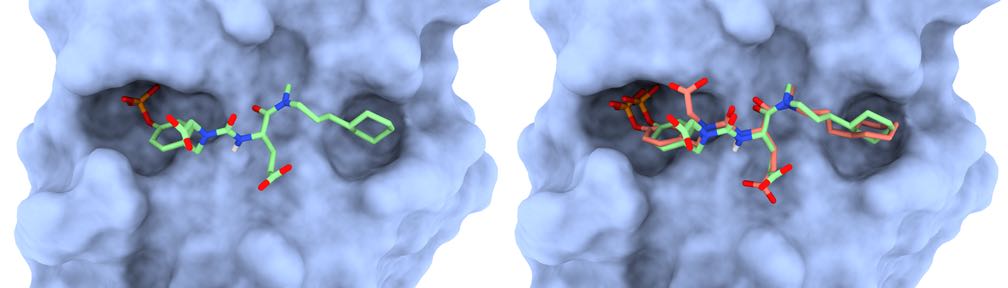
Molecular docking
We have developed a new docking protocol for large ligands and were able to predict new binding modes.
Formal Methods and Robotics
Robust human-robot collaboration is made possible through scalable reactive synthesis.
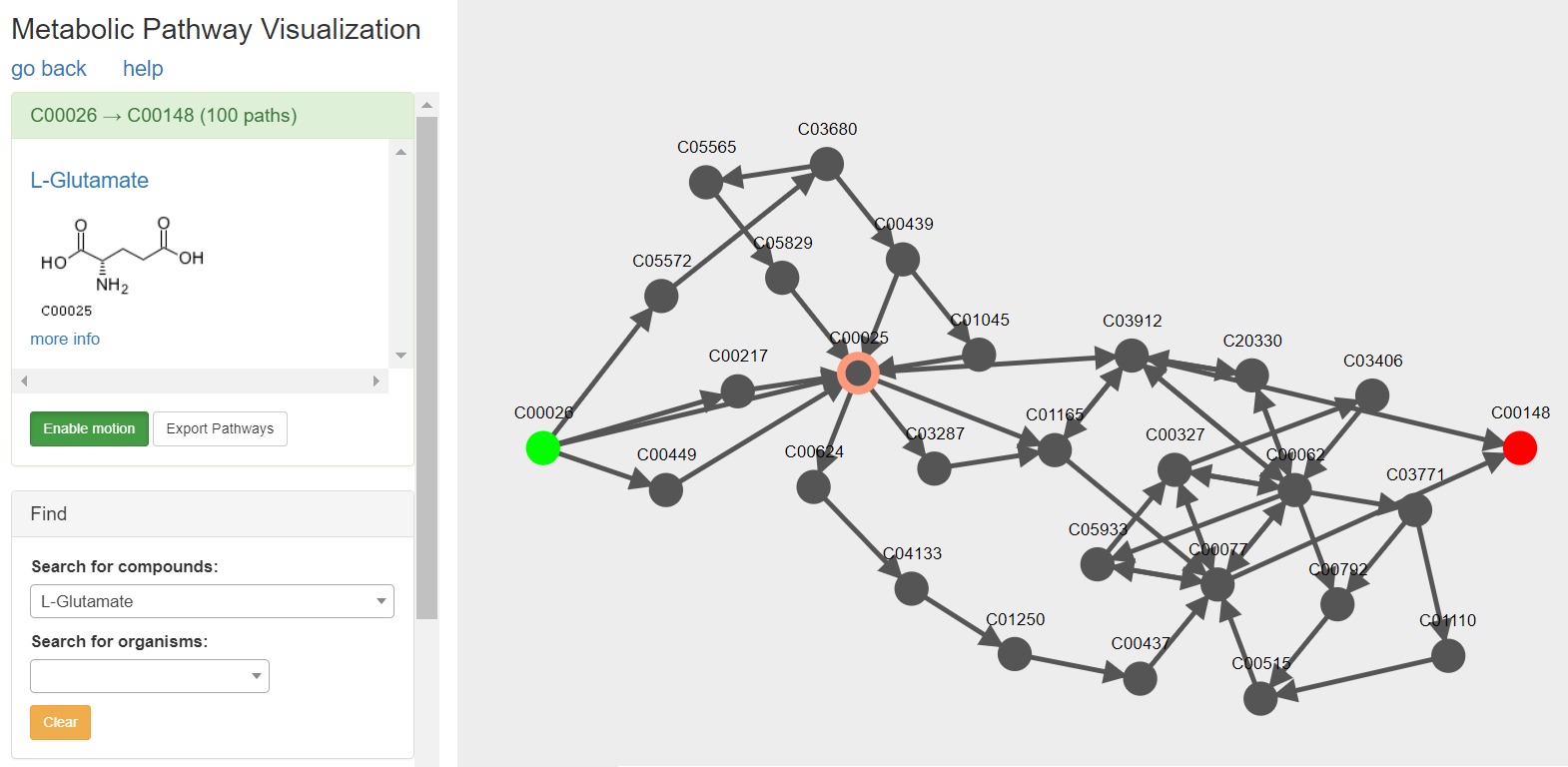
Metabolic Engineering
We are developing algorithms for discovering biological pathways for the production of valuable compounds as well as interactive visualization tools to efficiently present the results.
Computational Robotics & AI

- A Framework for Manipulation Planning and Execution under Uncertainty in Partially-Known Environments
- Scalable Next-Generation Software Infrastructure for High-Dimensional Search
- Collaborative Research: FW-HTF-RM: Robotic Teaching Assistant Systems for Nursing Instructors
- Automated and Robotic Inspection of Flood Control Systems
- A Novel Framework for Informed Manipulation Planning
- Robotic Collaboration through Scalable Reactive Synthesis
Computational Biomedicine

- PROTEAN CR: Proteomics Toolkit for Ensemble Analysis in Cancer Research
- Structure-based identification of SARS-derived peptides with potential to induce broad protective immunity
- Structure-based Selection of Tumor-antigens for T-cell Based Immunotherapy
- Structural modeling of peptide-HLA complexes presenting a melanoma-associated antigen for cross-reactivity assessment
- An Integrated Approach to Characterizing Conformational Changes of Large Proteins
- Mining Metabolic and Enzyme Databases for the Composition of Non-canonical Pathways